MA35D1 M4 使用設定

Description Enable the Remoteproc device driver in the Linux kernel.
$ bitbake linux-ma35d1 -c menuconfig
Device Drivers --->
Remoteproc drivers --->
[*] Support for Remote Processor subsystem
<*> MA35D1 remoteproc support
<Save> and <Exit>
Description Modify the device tree node setting of remoteproc in the Linux kernel.
LINUX_KERENL_PATH/arch/arm64/boot/dts/nuvoton/ma35d1.dtsi

Description Compile the Linux kernel.
$ bitbake linux-ma35d1 -C compile
Description
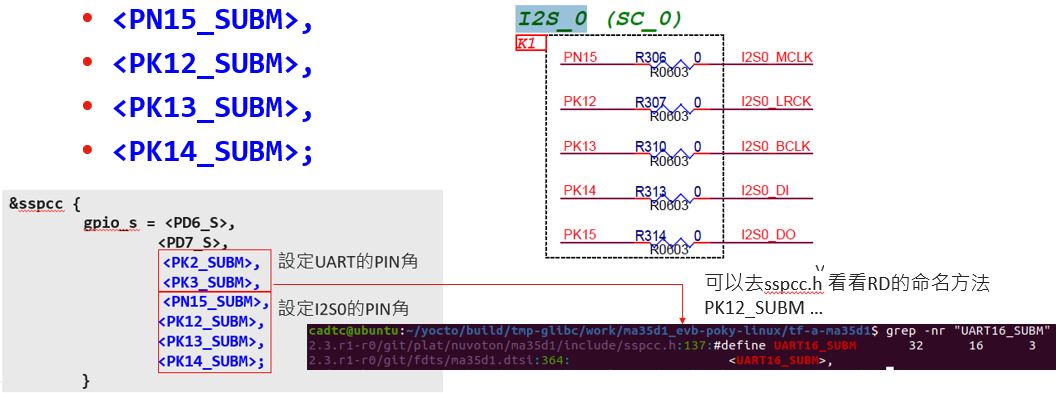
Modify the device tree node setting of SSPCC in the TF-A.
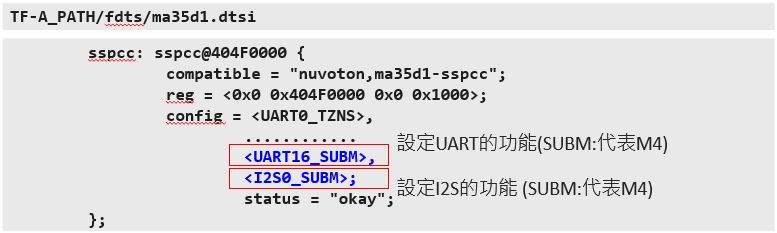
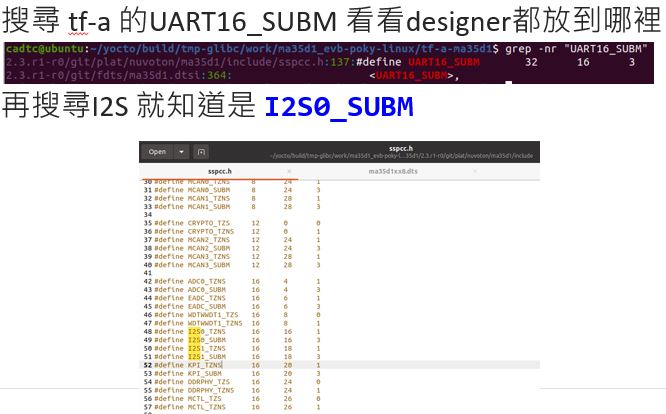
怎麼知道是I2S0_SUBM的?
Description
Modify the device tree node setting of SSPCC in the TF-A.
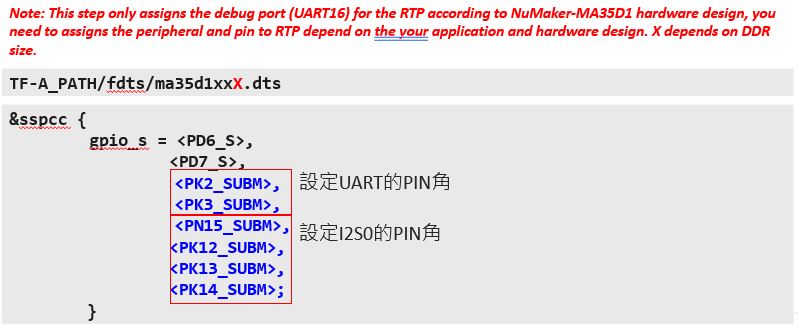
怎麼知道是這4根pin角的?
Description Compile the TF-A.
$ bitbake tf-a-ma35d1 -C compile
Description Build-up Image. Qt 版本:
bitbake nvt-image-qt5 -c cleanall && bitbake nvt-image-qt5
Minimal 版本:
$ bitbake core-image-minimal –c cleanall && bitbake core-image-minimal
Description Burn-in Image into SD card. 燒入SD卡
$ sudo dd if=nvt-image-qt5-evb-ma35d1-xxxxx.rootfs.sdcard of=/dev/sdb
延展SD的size
sudo ./ma35d1_resize.sh /dev/sdb 1 apply
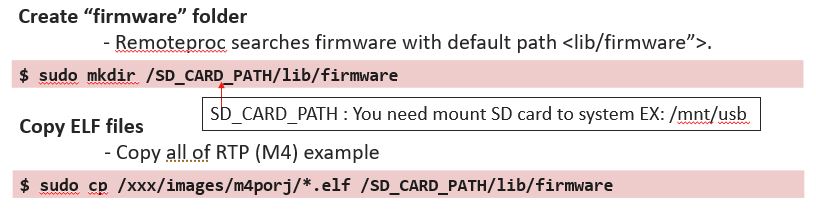
把 M4 的.axf 放到SD卡的 /lib/firmware 中
Note: The following step copy all of RTP (M4) sample codes in the M4_BSP into Filesystem. You can chose the sample code you want to use or replace with the firmware you developed.
執行 M4 axf 的指令
echo -n /lib/firmware > /sys/module/firmware_class/parameters/path
echo -n I2S_Codec_PDMA.elf > /sys/class/remoteproc/remoteproc0/firmware
echo start > /sys/class/remoteproc/remoteproc0/state
echo stop > /sys/class/remoteproc/remoteproc0/state
Remoteproc - Keil IDE 設定
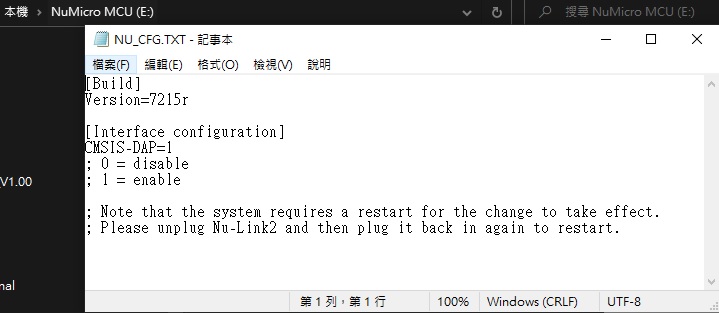
Nu-link 的DAP 要設定1
PS:原本我們開發板的NuLink 是 0 ,MA35D1的要改1