說明文件
 comments powered by Disqus
comments powered by Disqus
PWM 的 應用範例
BSP EPWM
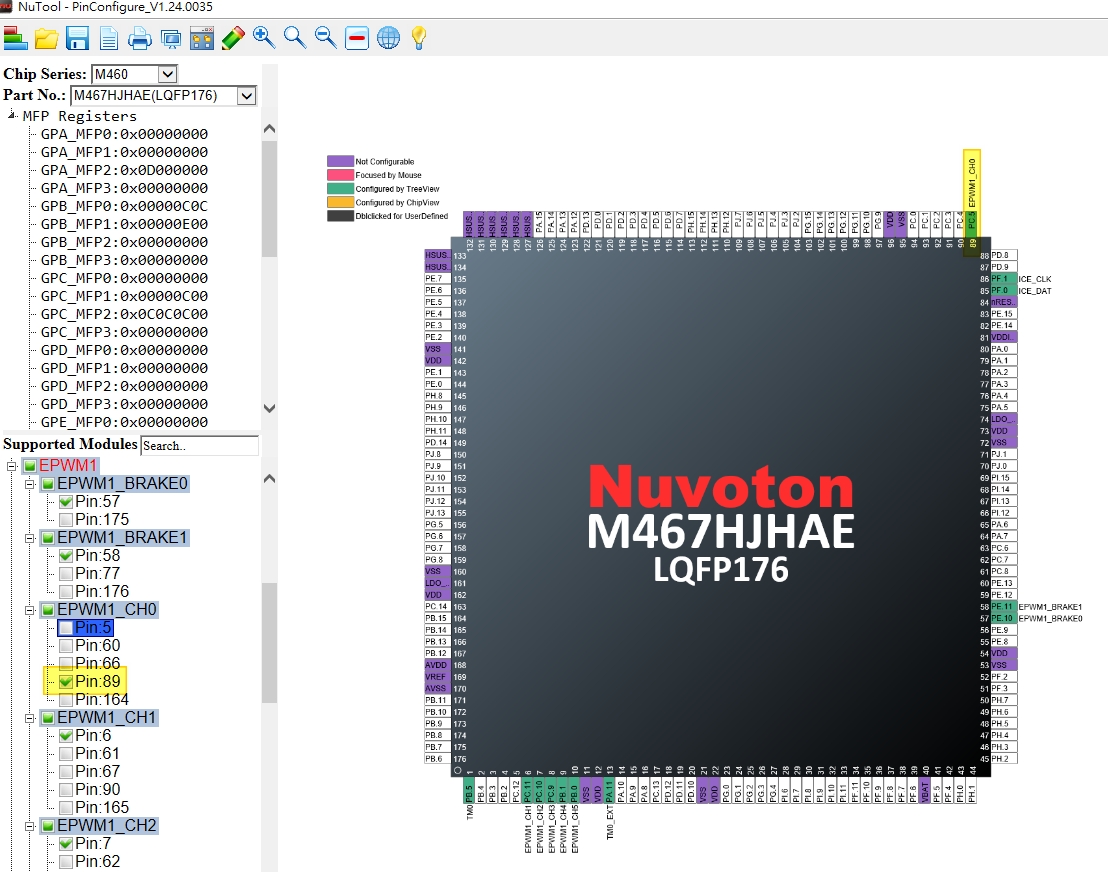
我是找 BSP 使用的 PWM PIN 角, 但還是用pinconfigure 看一下
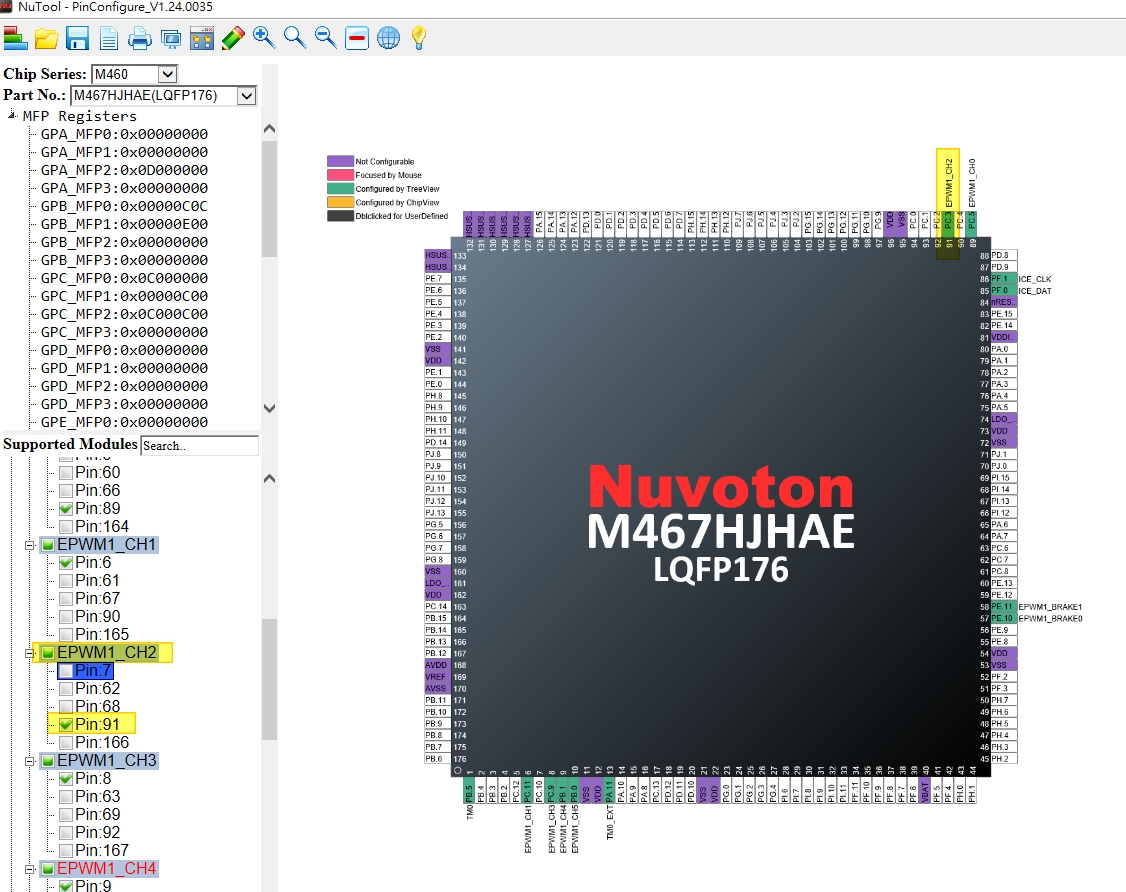
所以根據上圖以及BSP ,
PWM1 的 Channel0
會發訊號 給
PWM1 的 Channel2
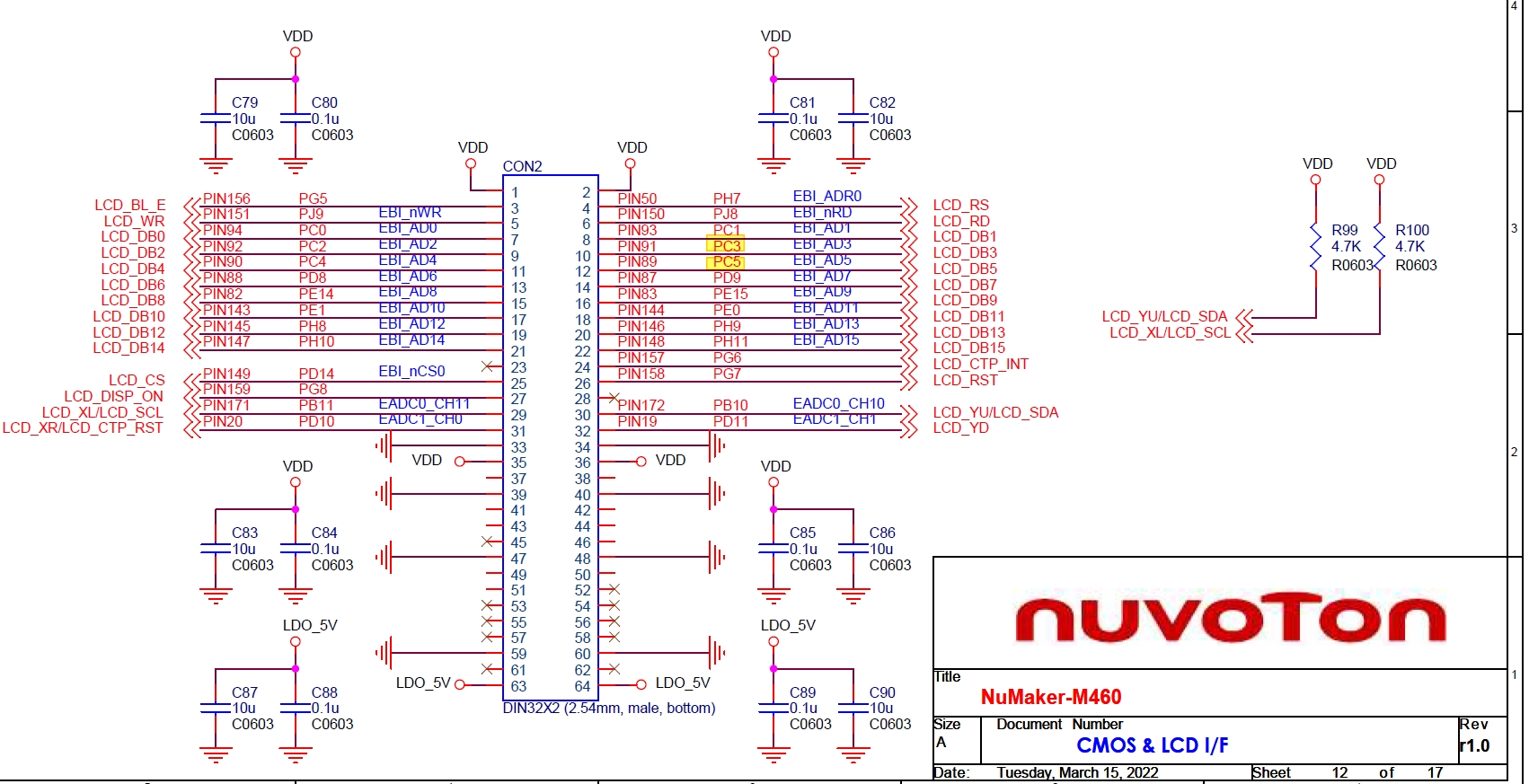
查看開發版的電路圖 是哪兩根PIN
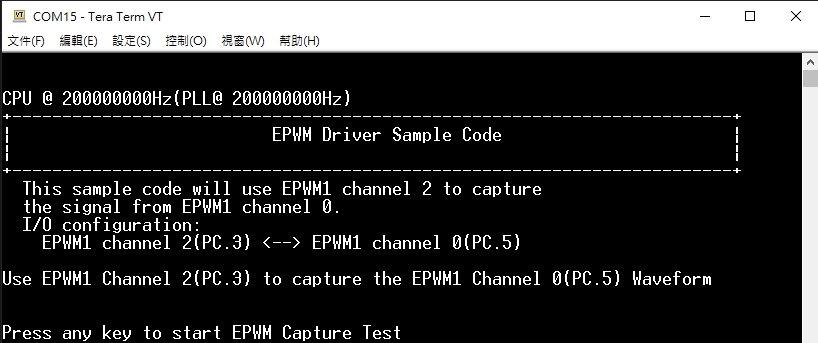
EPWM_Capture BSP 的 console
量測邏輯分析儀
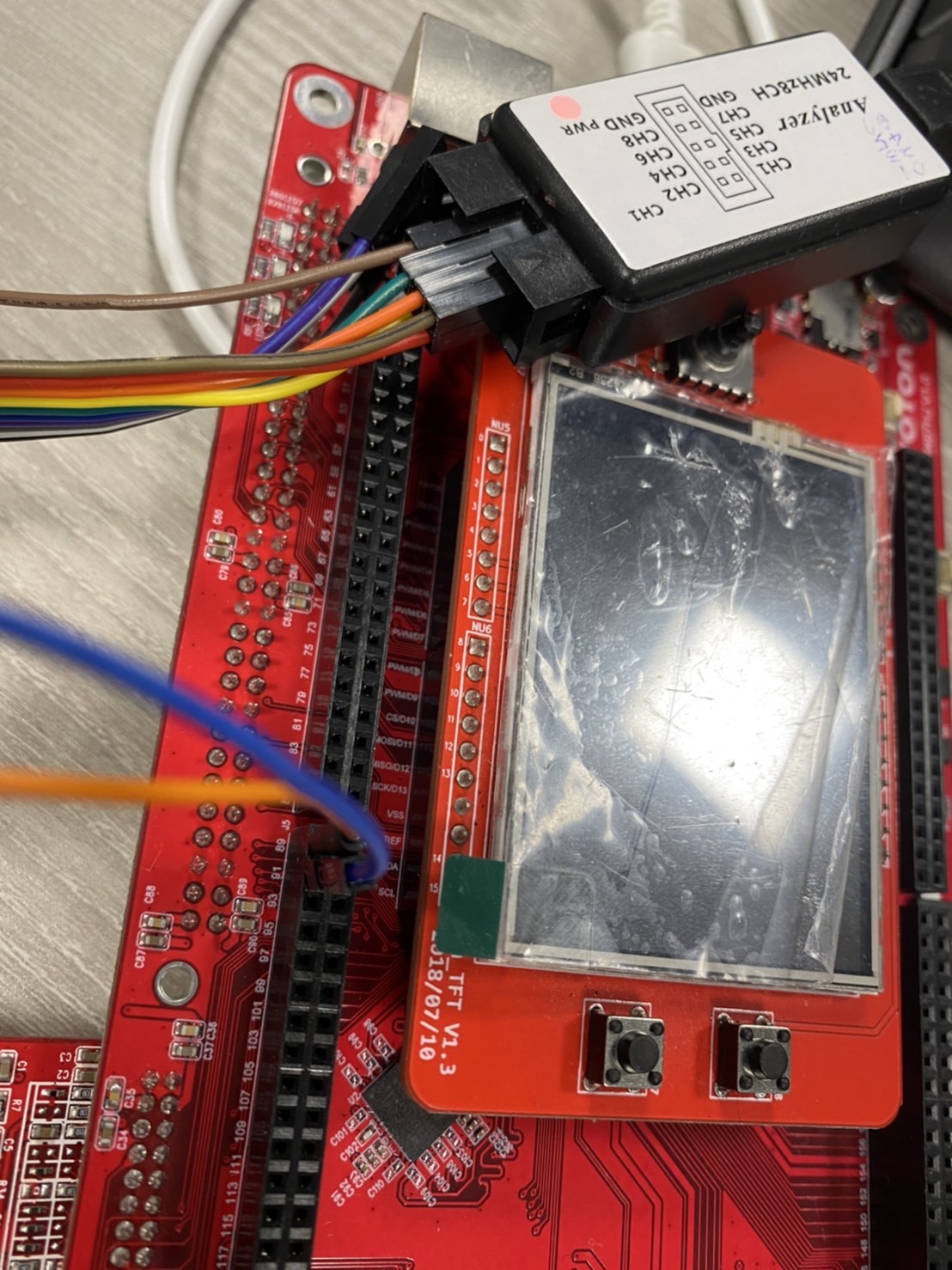


EPWM1 的 channel0 發 250 Hz pwm 訊號 30% duty
/**************************************************************************//**
* @file main.c
* @version V3.00
* @brief Capture the EPWM1 Channel 0 waveform by EPWM1 Channel 2.
*
* @copyright SPDX-License-Identifier: Apache-2.0
* @copyright Copyright (C) 2021 Nuvoton Technology Corp. All rights reserved.
******************************************************************************/
#include <stdio.h>
#include "NuMicro.h"
/*---------------------------------------------------------------------------------------------------------*/
/* Macro, type and constant definitions */
/*---------------------------------------------------------------------------------------------------------*/
/*---------------------------------------------------------------------------------------------------------*/
/* Global variables */
/*---------------------------------------------------------------------------------------------------------*/
void CalPeriodTime(EPWM_T *EPWM, uint32_t u32Ch);
void SYS_Init(void);
void UART0_Init(void);
/*--------------------------------------------------------------------------------------*/
/* Capture function to calculate the input waveform information */
/* au32Count[4] : Keep the internal counter value when input signal rising / falling */
/* happens */
/* */
/* time A B C D */
/* ___ ___ ___ ___ ___ ___ ___ ___ */
/* ____| |_| |_| |_| |_| |_| |_| |_| |_____ */
/* index 0 1 2 3 */
/* */
/* The capture internal counter down count from 0x10000, and reload to 0x10000 after */
/* input signal falling happens (Time B/C/D) */
/*--------------------------------------------------------------------------------------*/
void CalPeriodTime(EPWM_T *EPWM, uint32_t u32Ch)
{
uint16_t au16Count[4];
uint32_t u32i;
uint16_t u16RisingTime, u16FallingTime, u16HighPeriod, u16LowPeriod, u16TotalPeriod;
/* Clear Capture Falling Indicator (Time A) */
EPWM_ClearCaptureIntFlag(EPWM, u32Ch, EPWM_CAPTURE_INT_FALLING_LATCH);
/* Wait for Capture Falling Indicator */
while((EPWM1->CAPIF & EPWM_CAPIF_CFLIF2_Msk) == 0);
/* Clear Capture Falling Indicator (Time B)*/
EPWM_ClearCaptureIntFlag(EPWM, u32Ch, EPWM_CAPTURE_INT_FALLING_LATCH);
u32i = 0;
while(u32i < 4)
{
/* Wait for Capture Falling Indicator */
while(EPWM_GetCaptureIntFlag(EPWM, u32Ch) < 2);
/* Clear Capture Falling and Rising Indicator */
EPWM_ClearCaptureIntFlag(EPWM, u32Ch, EPWM_CAPTURE_INT_FALLING_LATCH | EPWM_CAPTURE_INT_RISING_LATCH);
/* Get Capture Falling Latch Counter Data */
au16Count[u32i++] = (uint16_t)EPWM_GET_CAPTURE_FALLING_DATA(EPWM, u32Ch);
/* Wait for Capture Rising Indicator */
while(EPWM_GetCaptureIntFlag(EPWM, u32Ch) < 2);
/* Clear Capture Rising Indicator */
EPWM_ClearCaptureIntFlag(EPWM, u32Ch, EPWM_CAPTURE_INT_RISING_LATCH);
/* Get Capture Rising Latch Counter Data */
au16Count[u32i++] = (uint16_t)EPWM_GET_CAPTURE_RISING_DATA(EPWM, u32Ch);
}
u16RisingTime = au16Count[1];
u16FallingTime = au16Count[0];
u16HighPeriod = au16Count[1] - au16Count[2];
u16LowPeriod = (uint16_t)(0x10000 - au16Count[1]);
u16TotalPeriod = (uint16_t)(0x10000 - au16Count[2]);
printf("\nEPWM generate: \nHigh Period=17141 ~ 17143, Low Period=39999 ~ 40001, Total Period=57141 ~ 57143\n");
printf("\nCapture Result: Rising Time = %d, Falling Time = %d \nHigh Period = %d, Low Period = %d, Total Period = %d.\n\n",
u16RisingTime, u16FallingTime, u16HighPeriod, u16LowPeriod, u16TotalPeriod);
if((u16HighPeriod < 17141) || (u16HighPeriod > 17143) || (u16LowPeriod < 39999) || (u16LowPeriod > 40001) || (u16TotalPeriod < 57141) || (u16TotalPeriod > 57143))
printf("Capture Test Fail!!\n");
else
printf("Capture Test Pass!!\n");
}
void SYS_Init(void)
{
/* Set PF multi-function pins for XT1_OUT(PF.2) and XT1_IN(PF.3) */
SET_XT1_OUT_PF2();
SET_XT1_IN_PF3();
/*---------------------------------------------------------------------------------------------------------*/
/* Init System Clock */
/*---------------------------------------------------------------------------------------------------------*/
/* Enable HIRC and HXT clock */
CLK_EnableXtalRC(CLK_PWRCTL_HIRCEN_Msk | CLK_PWRCTL_HXTEN_Msk);
/* Wait for HIRC and HXT clock ready */
CLK_WaitClockReady(CLK_STATUS_HIRCSTB_Msk | CLK_STATUS_HXTSTB_Msk);
/* Set PCLK0 and PCLK1 to HCLK/2 */
CLK->PCLKDIV = (CLK_PCLKDIV_APB0DIV_DIV2 | CLK_PCLKDIV_APB1DIV_DIV2);
/* Set core clock to 200MHz */
CLK_SetCoreClock(200000000);
/* Enable all GPIO clock */
CLK->AHBCLK0 |= CLK_AHBCLK0_GPACKEN_Msk | CLK_AHBCLK0_GPBCKEN_Msk | CLK_AHBCLK0_GPCCKEN_Msk | CLK_AHBCLK0_GPDCKEN_Msk |
CLK_AHBCLK0_GPECKEN_Msk | CLK_AHBCLK0_GPFCKEN_Msk | CLK_AHBCLK0_GPGCKEN_Msk | CLK_AHBCLK0_GPHCKEN_Msk;
CLK->AHBCLK1 |= CLK_AHBCLK1_GPICKEN_Msk | CLK_AHBCLK1_GPJCKEN_Msk;
/* Enable UART0 module clock */
CLK_EnableModuleClock(UART0_MODULE);
/* Select UART0 module clock source as HIRC and UART0 module clock divider as 1 */
CLK_SetModuleClock(UART0_MODULE, CLK_CLKSEL1_UART0SEL_HIRC, CLK_CLKDIV0_UART0(1));
/* Enable EPWM1 module clock */
CLK_EnableModuleClock(EPWM1_MODULE);
/* Select EPWM1 module clock source */
CLK_SetModuleClock(EPWM1_MODULE, CLK_CLKSEL2_EPWM1SEL_PCLK1, 0);
/*---------------------------------------------------------------------------------------------------------*/
/* Init I/O Multi-function */
/*---------------------------------------------------------------------------------------------------------*/
/* Set multi-function pins for UART0 RXD and TXD */
SET_UART0_RXD_PB12();
SET_UART0_TXD_PB13();
/* Set multi-function pin for EPWM */
SET_EPWM1_CH0_PC5();
SET_EPWM1_CH2_PC3();
}
void UART0_Init(void)
{
/*---------------------------------------------------------------------------------------------------------*/
/* Init UART */
/*---------------------------------------------------------------------------------------------------------*/
/* Configure UART0 and set UART0 baud rate */
UART_Open(UART0, 115200);
}
/*---------------------------------------------------------------------------------------------------------*/
/* Main Function */
/*---------------------------------------------------------------------------------------------------------*/
int32_t main(void)
{
/* Init System, IP clock and multi-function I/O
In the end of SYS_Init() will issue SYS_LockReg()
to lock protected register. If user want to write
protected register, please issue SYS_UnlockReg()
to unlock protected register if necessary */
/* Unlock protected registers */
SYS_UnlockReg();
/* Init System, IP clock and multi-function I/O */
SYS_Init();
/* Lock protected registers */
SYS_LockReg();
/* Init UART to 115200-8n1 for print message */
UART0_Init();
printf("\n\nCPU @ %dHz(PLL@ %dHz)\n", SystemCoreClock, PllClock);
printf("+------------------------------------------------------------------------+\n");
printf("| EPWM Driver Sample Code |\n");
printf("| |\n");
printf("+------------------------------------------------------------------------+\n");
printf(" This sample code will use EPWM1 channel 2 to capture\n the signal from EPWM1 channel 0.\n");
printf(" I/O configuration:\n");
printf(" EPWM1 channel 2(PC.3) <--> EPWM1 channel 0(PC.5)\n\n");
printf("Use EPWM1 Channel 2(PC.3) to capture the EPWM1 Channel 0(PC.5) Waveform\n");
while(1)
{
printf("\n\nPress any key to start EPWM Capture Test\n");
getchar();
/*--------------------------------------------------------------------------------------*/
/* Set the EPWM1 Channel 0 as EPWM output function. */
/*--------------------------------------------------------------------------------------*/
/* Assume EPWM output frequency is 250Hz and duty ratio is 30%, user can calculate EPWM settings by follows.(up counter type)
duty ratio = (CMR)/(CNR+1)
cycle time = CNR+1
High level = CMR
EPWM clock source frequency = PLL/2 = 100000000
(CNR+1) = EPWM clock source frequency/prescaler/EPWM output frequency
= 100000000/7/250 = 57142
(Note: CNR is 16 bits, so if calculated value is larger than 65536, user should increase prescale value.)
CNR = 57141
duty ratio = 30% ==> (CMR)/(CNR+1) = 30%
CMR = 17142
Prescale value is 6 : prescaler= 7
*/
/* Set EPWM1 channel 0 output configuration */
EPWM_ConfigOutputChannel(EPWM1, 0, 250, 30);
/* Enable EPWM Output path for EPWM1 channel 0 */
EPWM_EnableOutput(EPWM1, EPWM_CH_0_MASK);
/* Enable Timer for EPWM1 channel 0 */
EPWM_Start(EPWM1, EPWM_CH_0_MASK);
/*--------------------------------------------------------------------------------------*/
/* Set the EPWM1 channel 2 for capture function */
/*--------------------------------------------------------------------------------------*/
/* If input minimum frequency is 250Hz, user can calculate capture settings by follows.
Capture clock source frequency = PLL = 100000000 in the sample code.
(CNR+1) = Capture clock source frequency/prescaler/minimum input frequency
= 100000000/7/250 = 57142
(Note: CNR is 16 bits, so if calculated value is larger than 65536, user should increase prescale value.)
CNR = 0xFFFF
(Note: In capture mode, user should set CNR to 0xFFFF to increase capture frequency range.)
Capture unit time = 1/Capture clock source frequency/prescaler
70 ns = 1/100000000/7
*/
/* Set EPWM1 channel 2 capture configuration */
EPWM_ConfigCaptureChannel(EPWM1, 2, 70, 0);
/* Enable Timer for EPWM1 channel 2 */
EPWM_Start(EPWM1, EPWM_CH_2_MASK);
/* Enable Capture Function for EPWM1 channel 2 */
EPWM_EnableCapture(EPWM1, EPWM_CH_2_MASK);
/* Enable falling capture reload */
EPWM1->CAPCTL |= EPWM_CAPCTL_FCRLDEN2_Msk;
/* Wait until EPWM1 channel 2 Timer start to count */
while((EPWM1->CNT[2]) == 0);
/* Capture the Input Waveform Data */
CalPeriodTime(EPWM1, 2);
/*------------------------------------------------------------------------------------------------------------*/
/* Stop EPWM1 channel 0 (Recommended procedure method 1) */
/* Set EPWM Timer loaded value(Period) as 0. When EPWM internal counter(CNT) reaches to 0, disable EPWM Timer */
/*------------------------------------------------------------------------------------------------------------*/
/* Set EPWM1 channel 0 loaded value as 0 */
EPWM_Stop(EPWM1, EPWM_CH_0_MASK);
/* Wait until EPWM1 channel 0 Timer Stop */
while((EPWM1->CNT[0] & EPWM_CNT0_CNT_Msk) != 0);
/* Disable Timer for EPWM1 channel 0 */
EPWM_ForceStop(EPWM1, EPWM_CH_0_MASK);
/* Disable EPWM Output path for EPWM1 channel 0 */
EPWM_DisableOutput(EPWM1, EPWM_CH_0_MASK);
/*------------------------------------------------------------------------------------------------------------*/
/* Stop EPWM1 channel 2 (Recommended procedure method 1) */
/* Set EPWM Timer loaded value(Period) as 0. When EPWM internal counter(CNT) reaches to 0, disable EPWM Timer */
/*------------------------------------------------------------------------------------------------------------*/
/* Set loaded value as 0 for EPWM1 channel 2 */
EPWM_Stop(EPWM1, EPWM_CH_2_MASK);
/* Wait until EPWM1 channel 2 current counter reach to 0 */
while((EPWM1->CNT[2] & EPWM_CNT2_CNT_Msk) != 0);
/* Disable Timer for EPWM1 channel 2 */
EPWM_ForceStop(EPWM1, EPWM_CH_2_MASK);
/* Disable Capture Function and Capture Input path for EPWM1 channel 2*/
EPWM_DisableCapture(EPWM1, EPWM_CH_2_MASK);
/* Clear Capture Interrupt flag for EPWM1 channel 2 */
EPWM_ClearCaptureIntFlag(EPWM1, 2, EPWM_CAPTURE_INT_FALLING_LATCH);
}
}
/*** (C) COPYRIGHT 2021 Nuvoton Technology Corp. ***/