說明文件
 comments powered by Disqus
comments powered by Disqus
Timer Toggle 使用邏輯分析儀量測timer toggle (by M460)
Timer0 電路位置
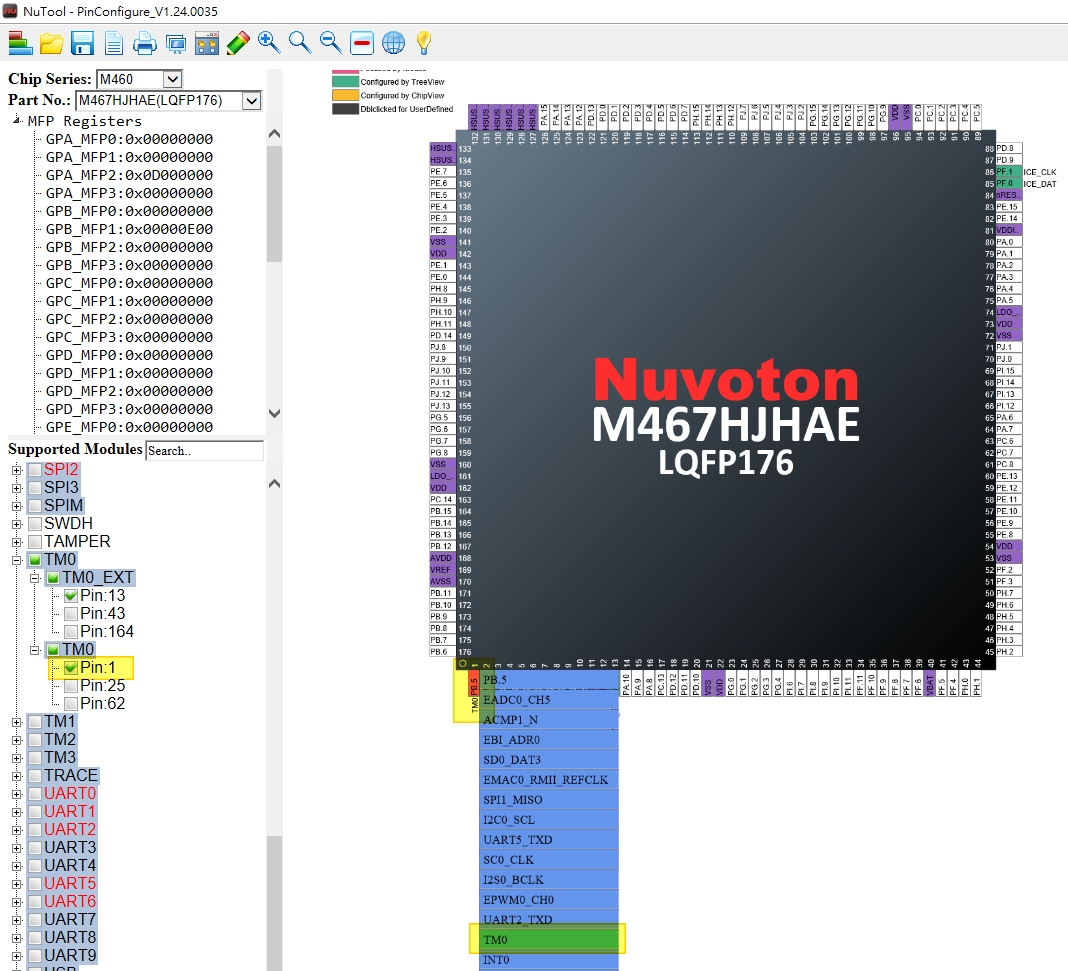
由pinconfigure 可以知道Timer0 在 pin 1 (PB5) 接著
設定 Timer0 pin 角
//—PIN—- /* Set timer toggle out pin */ SET_TM0_PB5();
Timer Delay
Delay 1 秒:
TIMER_Delay(TIMER0, 1000000);
Timer init_TIMER0_Toggle
TIMER_Open(TIMER0, TIMER_TOGGLE_MODE, 250000);
開啟TIMER0 反轉250K
邏輯分析儀量測
- 邏輯分析儀 桶著 Pin1
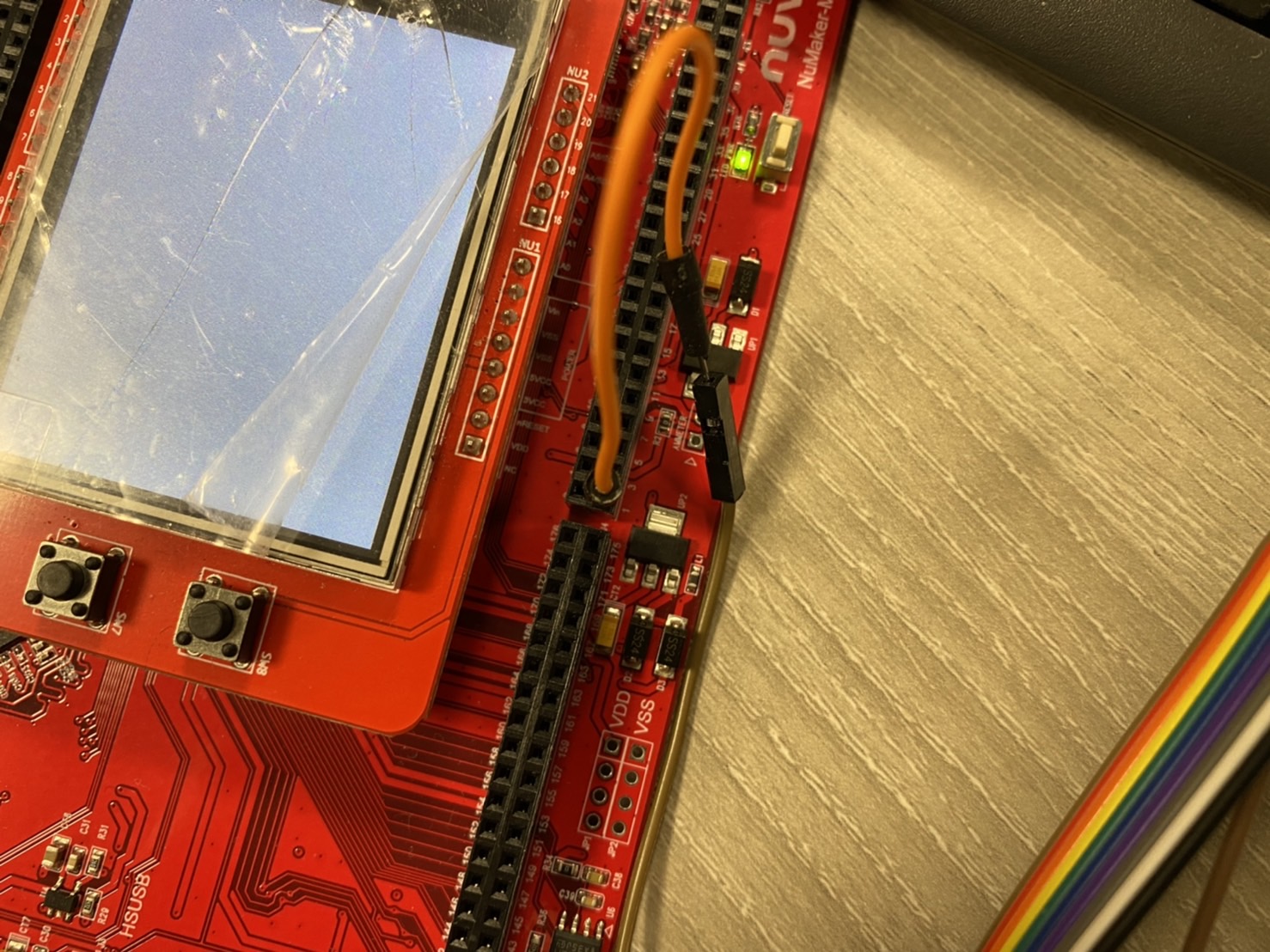
- 開 Salease 邏輯分析儀 SW
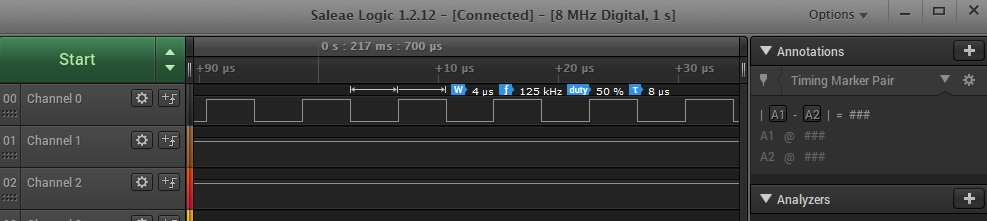
可以發現訊號是125K Hz 波峰 +波谷 就250K Hz
/*---------------------------------------------------------------------------------------------------------*/
/* Global Interface Variables Declarations */
/*---------------------------------------------------------------------------------------------------------*/
volatile uint32_t g_au32TMRINTCount[4] = {0};
//----------------- TIMER0 --------------------
void TMR0_IRQHandler(void)
{
if(TIMER_GetIntFlag(TIMER0) == 1)
{
/* Clear Timer0 time-out interrupt flag */
TIMER_ClearIntFlag(TIMER0);
g_au32TMRINTCount[0]++;
PH4 ^= 1;
}
}
void TMR0_Init(void)
{
/* Enable TIMER module clock */
//---clock---
CLK_EnableModuleClock(TMR0_MODULE);
CLK_SetModuleClock(TMR0_MODULE, CLK_CLKSEL1_TMR0SEL_HXT, 0);
//---PIN----
/* Set timer toggle out pin */
SET_TM0_PB5();
/* Open Timer0 in periodic mode, enable interrupt and 1 interrupt tick per second */
TIMER_Open(TIMER0, TIMER_PERIODIC_MODE, 1);
/* Start Timer0 ~ Timer3 counting */
TIMER_Start(TIMER0);
//--- NVIC ----
TIMER_EnableInt(TIMER0);
/* Enable Timer0 ~ Timer3 NVIC */
NVIC_EnableIRQ(TMR0_IRQn);
/* Check Timer0 ~ Timer3 interrupt counts */
//g_au32TMRINTCount[0];
}
void init_TIMER0_Toggle(void)
{
/* Enable TIMER module clock */
//---clock---
CLK_EnableModuleClock(TMR0_MODULE);
CLK_SetModuleClock(TMR0_MODULE, CLK_CLKSEL1_TMR0SEL_HXT, 0);
//---PIN----
/* Set timer toggle out pin */
SET_TM0_PB5();
/* Open Timer0 in periodic mode, enable interrupt and 1 interrupt tick per second */
TIMER_Open(TIMER0, TIMER_TOGGLE_MODE, 250000);
/* Start Timer0 ~ Timer3 counting */
TIMER_Start(TIMER0);
}
//-------------- HCLK -------------
void init_HCLK(void){
SYS_UnlockReg();
/*---------------------------------------------------------------------------------------------------------*/
/* Init System Clock */
/*---------------------------------------------------------------------------------------------------------*/
/* Set PCLK0 and PCLK1 to HCLK/2 */
CLK->PCLKDIV = (CLK_PCLKDIV_APB0DIV_DIV2 | CLK_PCLKDIV_APB1DIV_DIV2);
/* Set core clock to 200MHz */
CLK_SetCoreClock(200000000);
/* Enable all GPIO clock */
CLK->AHBCLK0 |= CLK_AHBCLK0_GPACKEN_Msk | CLK_AHBCLK0_GPBCKEN_Msk | CLK_AHBCLK0_GPCCKEN_Msk | CLK_AHBCLK0_GPDCKEN_Msk |
CLK_AHBCLK0_GPECKEN_Msk | CLK_AHBCLK0_GPFCKEN_Msk | CLK_AHBCLK0_GPGCKEN_Msk | CLK_AHBCLK0_GPHCKEN_Msk;
CLK->AHBCLK1 |= CLK_AHBCLK1_GPICKEN_Msk | CLK_AHBCLK1_GPJCKEN_Msk;
/* Enable HXT clock */
CLK_EnableXtalRC(CLK_PWRCTL_HXTEN_Msk);
CLK_WaitClockReady( CLK_STATUS_HXTSTB_Msk);
SYS_LockReg();
}
/*---------------------------------------------------------------------------------------------------------*/
/* Main Function */
/*---------------------------------------------------------------------------------------------------------*/
int32_t main(void)
{
uint16_t cnt = 0;
uint8_t STA = 0;
/* Unlock protected registers */
SYS_UnlockReg();
/* Init System, peripheral clock and multi-function I/O */
SYS_Init();
/* Lock protected registers */
SYS_LockReg();
/* Init UART0 for printf */
UART0_Init();
init_HCLK();
init_TIMER0_Toggle();
// PH4 LED R
GPIO_SetMode(PH, BIT4, GPIO_MODE_OUTPUT);
while(1) {
}
}